

H-Bridge DC Dual Motor Driver Motor-shield PWM DC 3 ~ 36V 15A (30A pulse)
Italia
Nexive: per ordini inferiori a 24,98 € il costo é 2,50 € - consegna 7 - 15 gg lavorativi
Nexive: per ordini superiori a 24,99 € la spedizione é Gratis - consegna 7 - 15 gg lavorativi
DHL: per ordini inferiori a 24,98 € il costo é 9,90 € - consegna 2 - 3 gg lavorativi
DHL: per ordini compresi tra 24,99 € e 49,98 € il costo é 7,90 € - consegna 2 - 3 gg lavorativi
DHL: per ordini compresi tra 49,99 € e 98,99 € il costo é 5,90 € - consegna 2 - 3 gg lavorativi
DHL: per ordini superiori a 99 € la spedizione é Gratis - consegna 2 - 3 gg lavorativi
Europa
DHL: costo fisso di 15,99 € per il territorio europeo - consegna in 2 - 3 gg lavorativi
Poste Italiane Registered: peso max 250 gr. - il costo varia tra 7,10 € e 12,70 € - consegna in 2 - 4 settimane.
Resto del mondo
DHL: costo fisso di 39,99 € per il resto del mondo - consegna in 2 - 3 gg lavorativi
Poste Italiane Registered: peso max 250 gr. - il costo varia tra 8,40 € e 16,50 € - consegna in 2 - 4 settimane.
H-Bridge DC Dual Motor Driver Motor-shield PWM DC 3 ~ 36V 15A (30A pulse)
 Totale Valutazione
Totale Valutazione

|
|
0 |
|
|
0 |
|
|
0 |
|
|
0 |
|
|
0 |
Vedi recensioni
 Acquistando questo prodotto accumulerai 20 punti con il nostro programma fedeltà. Puoi convertire 20 punti nel tuo account in un buono per un acquisto futuro.
Acquistando questo prodotto accumulerai 20 punti con il nostro programma fedeltà. Puoi convertire 20 punti nel tuo account in un buono per un acquisto futuro.
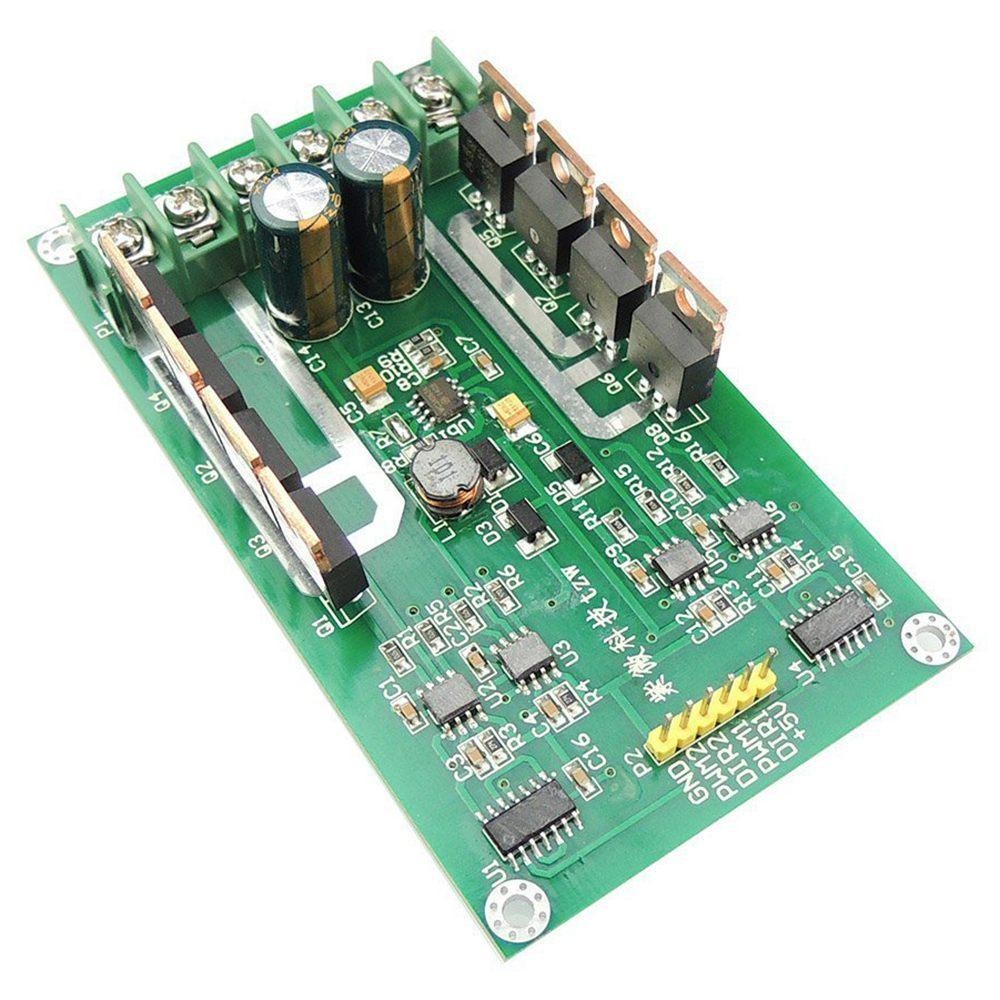
Questa scheda permette di controllare due motori differenti contemporaneamente. La scheda ha un range di tensione operativa molto ampio questo ne favorisce la versatilità in quanto può essere integrata in robot di piccole e grandi dimensioni. La scheda utilizza il protocollo PWM per una compatibilità ottimale con tutti i tipi microcontrollori (Es. Arduino, Esp32 ecc…). Questo modulo monta dei N-channel Mosfet che conciliano ottime prestazioni insieme a bassissime perdite di corrente, questa caratteristica rende la scheda perfetta per applicazioni a batteria.
| Tensione nominale: | 3v-36v DC |
| Corrente nominale: | 15A |
| Corrente di picco: | 30A |
| Max. Power senza dissipatore¹: | 1W per motore |
| PWM Max. Freq. : | 50KHz |
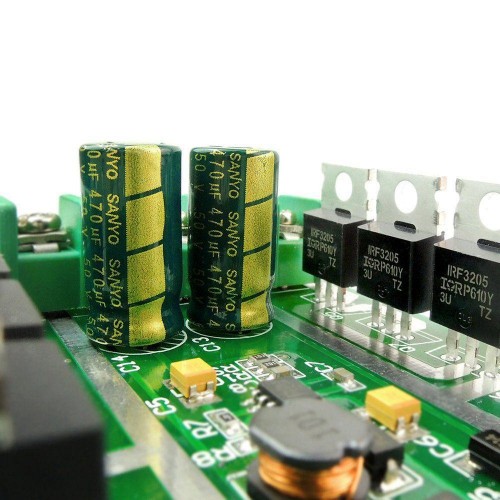
| N-Channel Mosfet: | RU6099R |
¹: I Mosfet senza dissipatore con potenze superiori a ~1W superano la loro temperatura massima operativa (175°C), questo incrementa il rischio di rottura e riduce notevolmente la vita del componente
La scheda motori ha una corrente nominale massima continua di 16 A. Tuttavia, la potenza massima erogabile dalla scheda è strettamente legata alla capacità dei Mosfet (IC nero con aletta metallica, posizionato ai lati della scheda) di dissipare il calore prodotto. Le prestazioni possono essere sicuramente migliorate aggiungendo un dissipatore isolato² (non incluso).
²: La scheda necessita di "heat-sink" indipendenti (una per ogni mosfet) per arrivare alla massima potenza dichiarata, Inoltre bisogna prestare attenzione che i corpi metallici dei singoli Mosfet rimangano isolati tra loro.
Il valore di ~1W è stato calcolato tramite la formula sottostante (Fig.1), tuttavia questo valore non tiene conto delle perdite dovute all'inversione di stato che aumenta l'energia da dissipare, per questo si consiglia di non superare la potenza di 1W se il Mosfet non è equipaggiato con un dissipatore adeguato.
 Fig.1
Fig.1
Legenda:
Potenza massima per il funzionamento del Mosfet senza pericolo di surriscaldamento
Temperatura massima della giunzione in silicio
Fattore di sicurezza che comprende altre perdite non considerate nella funzione
Temperatura ambiente in C°
Coefficiente di reistenza termica tra giunzione e ambiente
N.B.: Questo prodotto può diventare abbastanza caldo da bruciarti molto prima che il chip si surriscaldi. Fai attenzione quando maneggi questo prodotto e altri componenti a esso collegati.
Sulla scheda motori troviamo a i due estremi i connettori per i segnali logici (Es. PWM1, DIR1...) e dall'altro lato i morsetti di potenza (Es. MOT1,MOT2...). Per connettere la scheda motori a un controllore generico basta seguire l'immagine qui sotto (Fig. 1), queste sono le connessioni minime per far funzionare la scheda con due motori, se si desidera controllare un motore solo si possono lasciare scollegati i pin non interessati (quindi PWM2, DIR2).
Da notare che se il controllore ha un basso consumo può essere direttamente alimentato dalla scheda motori connettendo il pin "+5V" all'ingresso (tipicamente "Vin") del controllore. Fare attenzione però che al controllore non arrivino altre fonti di alimentazione come da un PC collegato tramite un cavo USB o una batteria. verificare nelle specifiche di alimentazione del controllore che la tenzione sia compatibile (5V) e la corrente non ecceda il limite di 500mA.
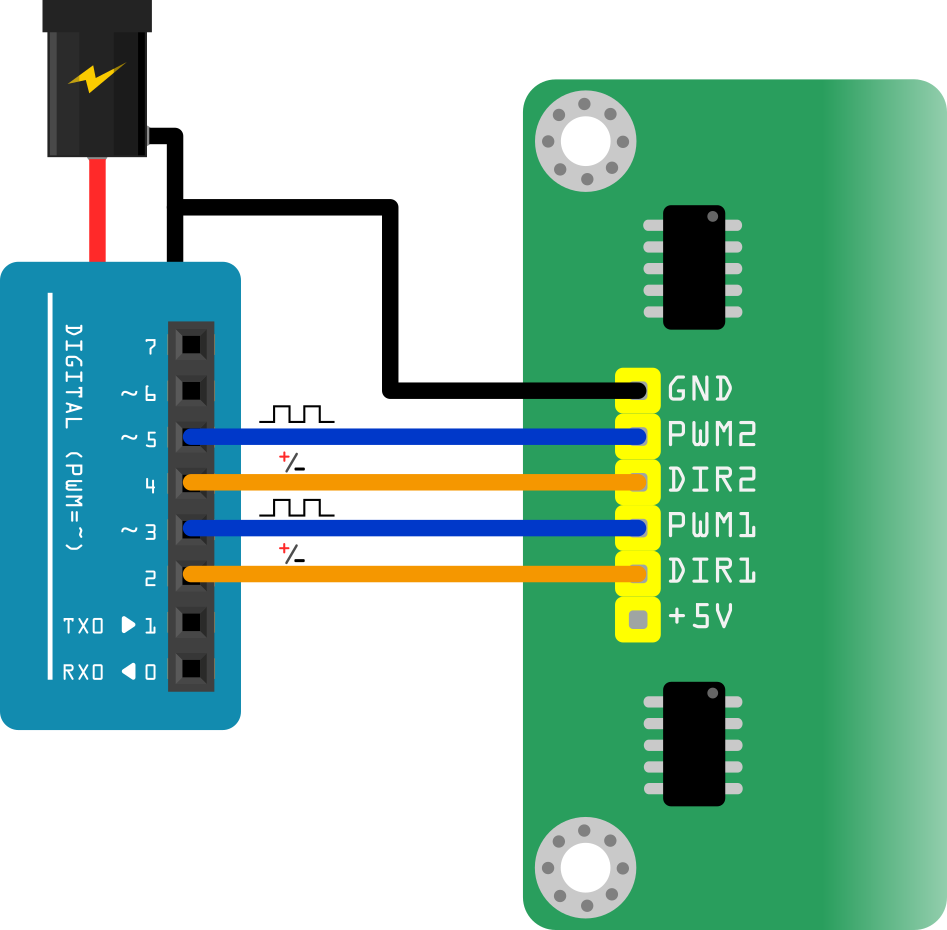 Fig.2
Fig.2
N.B.: I pin del controllore indicati sono solo a scopo rappresentativo, necessitano però i pin: PWM1 E PWM2 che siano connessi a dei pin abilitati al protocollo PWM del controllore (normalmente indicati sulla scheda altrimenti indicati nel data-sheet).
Per il lato con i connettori per i motori e l'alimentazione le connessioni sono rappresentate nell'immagine sottostante (Fig. 2). Questa scheda non necessita di una polarizzazione particolare per i connettori dei motori, essendo pensata per i motori DC (in corrente continua), se all'avvio dell'applicazione i motori risultano girare in senso contrario al dovuto è sufficiente invertire le connessioni dei motori alla scheda.
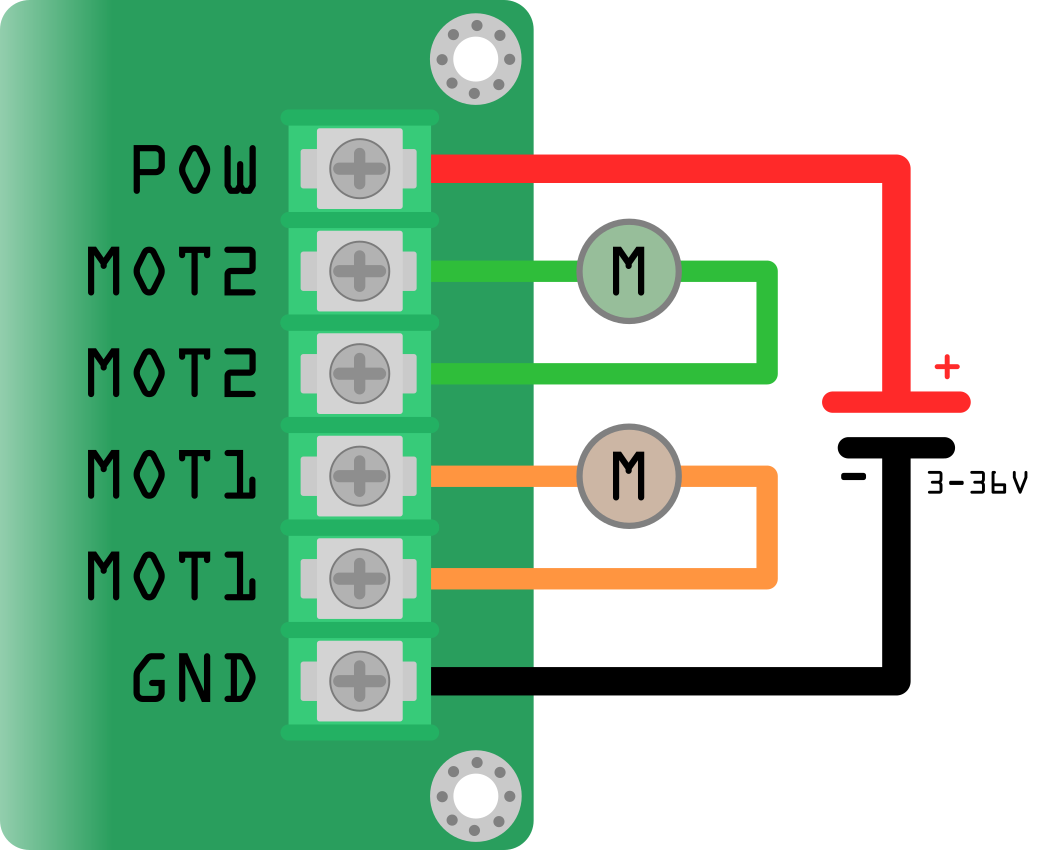 Fig. 3
Fig. 3
N.B.: se si necessità d'invertire la connessione dei motori accertarsi che ogni motore sia connesso al rispettivo morsetto, altrimenti si rischia di danneggiare la scheda.
La scheda è in grado di controllare i motori sia in potenza che in direzione. Il controllo della potenza è effettuato tramite l'ingresso PWMx, questo protocollo invia piccole pulsazioni di corrente al motore, così facendo è possibile regolare la potenza media del motore e di conseguenza la velocità. Il controllo di direzione invece è effettuato tramite l'ingresso DIRx, questo pin può assumere due stati: alto e basso, a seconda dello stato il motore girerà verso sinistra o verso destra.
PIN |
funzione |
| gnd (parte logica) | Questo pin è connesso al gnd compreso quello della parte d'alimentazione, si connette al gnd presente sul controllore |
| PWM1 | Ingresso "Pulse With Modulation": un segnale PWM su questo pin corrisponde a un'uscita PWM sull'uscita del motore 1. |
| DIR1 | Ingresso direzione motore 1, stati: "HIGH" e "LOW" |
| PWM2 | Ingresso "Pulse With Modulation": un segnale PWM su questo pin corrisponde a un'uscita PWM sull'uscita del motore 2. |
| DIR2 | Ingresso direzione motore 2, stati: "HIGH" e "LOW" |
| +5V | Questo pin eroga una tensione di 5V con una corrente max di 500mA |
| MOT1 (X2) | Questi morsetti servono per connettere il motore 1 alla scheda |
| MOT2 (X2) | Questi morsetti servono per connettere il motore 2 alla scheda |
| PWO | A questo morsetto viene connesso il lato positivo dell'alimentazione dei motori 3 – 36 V. |
| GND | A questo morsetto viene connesso il lato negativo dell'alimentazione dei motori 3 – 36 V. questo pin è anche connesso al gnd presente nella parte logica della scheda |
N.B.: Il controllore e la scheda motori devono condividere una massa comune.
Puoi essere il primo a fare una domanda su questo prodotto!